- 产品分类
移动测量扫描
当前位置:首页 >> 产品中心 >> 三维激光扫描/移动测量 >> 移动测量扫描
SZT-R1400车船载一体化测量系统
发布时间:2017-04-25 13:25:56 浏览量:4137次
SZT-R1400车船载一体化测量系统

产品简介:
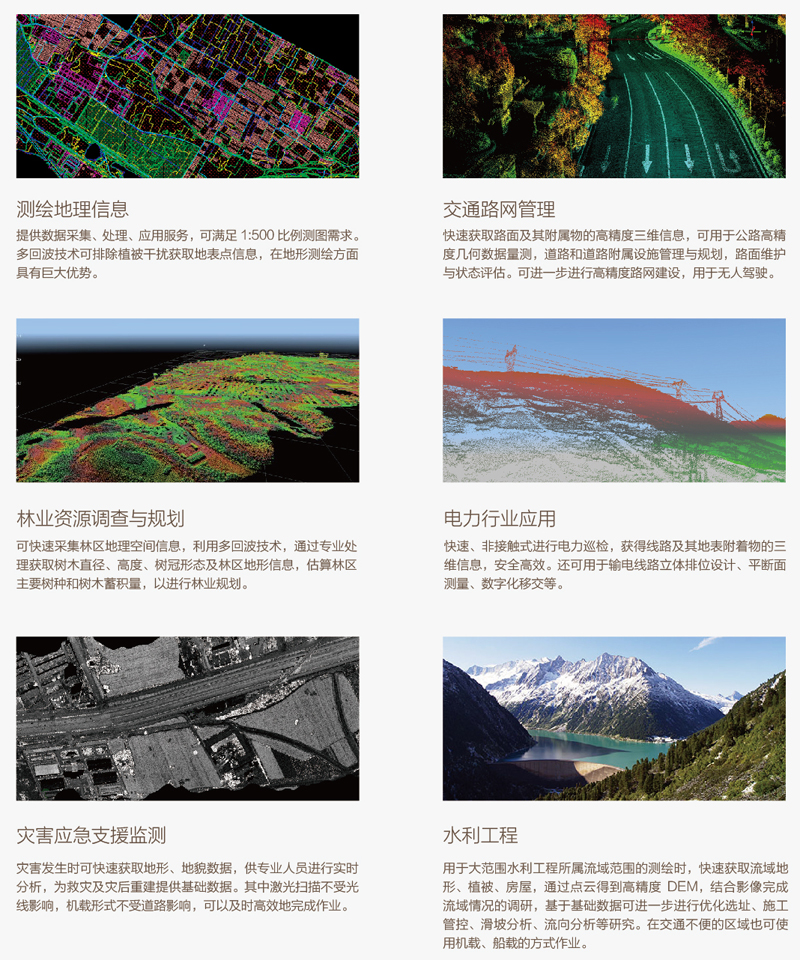
SZT-R1400一体化移动测量系统是我们自主研发制造的新型移动测量系统。将高精度三维激光扫描仪、GNSS卫星定位系统、惯性导航系统、360度全景相机以及控制模块、时间同步模块等高度集成,融合多种定位模式,方便快捷的安装于汽车和轮船等移动载体上,快速获取高精度多元数据。通过配套软件进行数据处理与加工,获取4D数据成果以及三维模型,可广泛应用于测绘、国土、交通、电力、数字城市和互联网街景等领域。
性能特点:
可改装
可根据用户的需求,进行优化改装
高集成
多部件高度集成,惯导系统与激光扫描仪一体化,即装即用,无需多次检校。
高精度
GNSS+INS和激光扫描技术,测量精度高。
效率高
高速运转的扫描仪以及稳定连续的定位系统,工作效率高
长测程
扫描测程可达1400m
多平台
系统可实现汽车、船舶、飞机等多平台搭建
易操作
灵活快速拆装,操作简便
高智能
后处理软件,点云数据和影像数据无缝对接,多类型成果输出
技术指标:
指标
参数
扫描测程
1400m
扫描速度
30万点/秒
扫描分辨率
2mm
扫描视场角
100°×360°(垂直×水平)
测量精度
2cm(100m处)
影像分辨率
全景8000*4000
作业速度
40Km/h
部分
标配
选配
pos系统
√
激光扫描仪
√
GNSS卫星导航系统
√
控制与存储系统
√
全景相机(车载配置)
√
单反相机(建议机载配置)
√
软件系统:
软件名称
主要功能
征图操控软件
CLMS-01小型激光测量设备实时显控程序,用于小型车载和机载激光测量设备的控制和实时轨迹监测。其主要功能有:开启和关闭扫描仪,开启相机、惯导、GNSS,导入航线文件,实时显示设备状态、行进轨迹、扫描点云、拍摄影像,下载惯导、GNSS、扫描仪数据等等
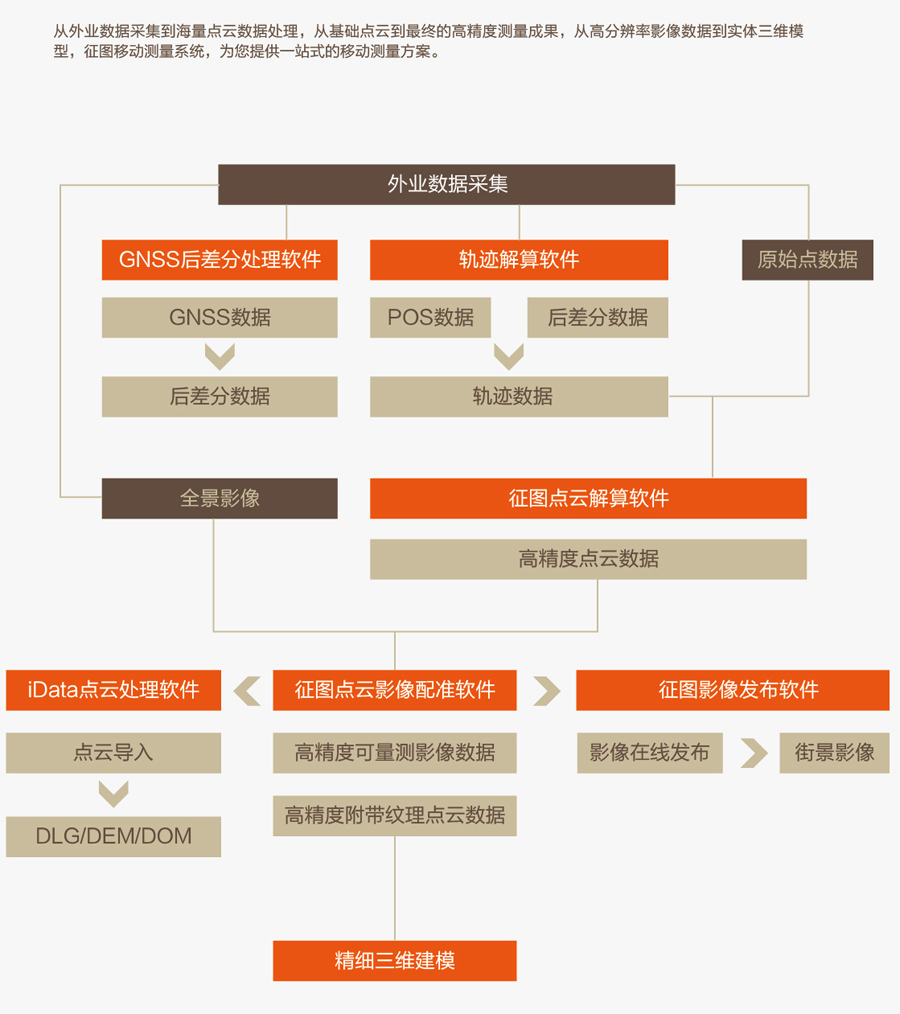
GNSS后差分处理软件
对基准站数据进行提取及格式转换
轨迹结算软件
融合GNSS后差分数据与IMU数据,获得高精度坐标与姿态(POS)信息
征图点云解算软件
进行基准站、移动站数据的格式转化,惯导数据的格式转化,提供由激光扫描仪导出的点云数据处理结果,可导出.las,.xyz,.view,等格式的点云数据
征图影像点云配准软件
PointProcess
主要用于读写、显示和浏览激光点云及全景影像,并进行点云数据与全景影像的空间配准,同时可以完成对空间点、线、面要素的测量和保存。
征图影像网上发布软件
CloudPoints
通过建立全景,实现全景网络发布,360°自由旋转浏览、加载显示热点信息、单像测量、跳转等功能
整体解决方案:
应用行业:扫描仪
POS系统
全景相机



角度分辨率:0.0005°
发射频率:300kHz
测距精度:5mm
扫描线速率:120线/秒
扫描市场角:100°×360°(垂直×水平)
激光器类型:脉冲式
激光等级:一激光
外壳防护等级:IP64防尘,防水飞溅
内置同步计时器
存储温度:-10℃~+50℃
作业温度:0℃~+40℃
重量:9.8KG
功耗:82W
惯导零漂:0.75°/h
差分后姿态精度:0.008°
差分后航向精度:0.012°
数据更新率:200Hz
数据存储空间:4G
工作温度范围:-40°~+71°
体积:128*128*104(mm)
重量:2.1Kg
功率:输入电压11~34VDC
功耗:16W
成像模块:6台500万像素高清CCD及低畸变镜头
采集控制模块:多相机同步软件、图像拼接软件
像元大小(um):3.45*3.45
芯片:Sony IC×655 CCD,2/3″
分辨率:单CCD2448*2048
全景:8000*4000
帧速:JPEG压缩,10FPS;无压缩:5FPS
数据接口:USB3.0
数据输出:12-bit raw 格式原始彩色图像
快门形式:全局快门
镜头:4.4mm定焦,覆盖率90%
GPIO:12-pin GPIO,可用于外触发、外部电源等。
尺寸:160*139(mm)
外壳:铝合金,防水防震
功耗:13W,12V